|
|
6 years ago | |
|---|---|---|
| .. | ||
| .cargo | 6 years ago | |
| raspi3_boot | 6 years ago | |
| src | 6 years ago | |
| Cargo.lock | 6 years ago | |
| Cargo.toml | 6 years ago | |
| Makefile | 6 years ago | |
| README.md | 6 years ago | |
| kernel8 | 6 years ago | |
| kernel8.img | 6 years ago | |
| link.ld | 6 years ago | |
README.md
Tutorial 0D - Virtual Memory
Virtual memory is an immensely complex, but exciting topic. In this first
lesson, we start slow and switch on the MMU and use static page tables. We will
only be concerned about the first 1 GiB of address space. That is the amount
of DRAM the usual Raspberry Pi 3 has. As we already know, the upper 16 MiB
of this gigabyte-window are occupied by the Raspberry's peripherals such as the
UART.
MMU and paging theory
At this point, we will not reinvent the wheel again and go into detailed descriptions of how paging in modern application processors works. The internet is full of great resources regarding this topic, and we encourage you to read some of it to get a high-level understanding of the topic.
To follow the rest of this AArch64 specific tutorial, we strongly recommend
that you stop right here and first read Chapter 12 of the ARM Cortex-A Series
Programmer's Guide for
ARMv8-A
before you continue. This will set you up with all the AArch64-specific
knowledge needed to follow along.
Back from reading Chapter 12 already? Good job 👍!
Approach
The following partitioning will be used for the static page tables:
- The first
2 MiBwill be mapped using a Level 3 table with4 KiBgranule.- This aperture includes, among others, the kernel's code, read-only data, and
mutable data. All of which will be
identity mappedto make our life easy for now. - In the past, we already made sure that the linker script aligns the
respective regions to
4 KiBboundaries.- This way, we can conveniently flag corresponding regions in distinct page table entries. E.g. marking the code regions executable, while the mutable data regions are not.
- This aperture includes, among others, the kernel's code, read-only data, and
mutable data. All of which will be
- All the rest will be mapped using
2 MiBgranule.
The actual code is divided into two files: memory.rs and memory/mmu.rs.
memory.rs
This file is used to describe our kernel's memory layout in a high-level abstraction using our own descriptor format. We can define ranges of arbitrary length and set respective attributes, for example if the bits and bytes in this range should be executable or not.
The descriptors we use here are agnostic of the hardware MMU's actual
descriptors, and we are also agnostic of the paging granule the MMU will use.
Having this distinction is less of a technical need and more a convenience
feature for us in order to easily describe the kernels memory layout, and
hopefully it makes the whole concept a bit more graspable for the reader.
The file contains a global static KERNEL_VIRTUAL_LAYOUT array which
stores these descriptors. The policy is to only store regions that are not
ordinary, normal chacheable DRAM. However, nothing prevents you from defining
those too if you wish to. Here is an example for the device MMIO region:
// Device MMIO
Descriptor {
virtual_range: || RangeInclusive::new(map::physical::MMIO_BASE, map::physical::MMIO_END),
translation: Translation::Identity,
attribute_fields: AttributeFields {
mem_attributes: MemAttributes::Device,
acc_perms: AccessPermissions::ReadWrite,
execute_never: true,
},
},
Finally, the file contains the following function:
fn get_virt_addr_properties(virt_addr: usize) -> Result<(usize, AttributeFields), &'static str>
It will be used by code in mmu.rs to request attributes for a virtual address
and the translation of the address. The function scans KERNEL_VIRTUAL_LAYOUT
for a descriptor that contains the queried address, and returns the respective
findings for the first entry that is a hit. If no entry is found, it returns
default attributes for normal chacheable DRAM and the input address, hence
telling the MMU code that the requested address should be identity mapped.
Due to this default return, it is not needed to define normal cacheable DRAM
regions in KERNEL_VIRTUAL_LAYOUT.
mmu.rs
This file contains the AArch64 specific code. It is a driver, if you like, and
the split in paging granule mentioned before is hardcoded here (4 KiB page
descriptors for the first 2 MiB and 2 MiB block descriptors for everything
else).
Two static page table arrays are instantiated, LVL2_TABLE and LVL3_TABLE,
and they are populated using get_virt_addr_properties() and a bunch of utility
functions that convert our own descriptors to the actual 64 bit descriptor
entries needed by the MMU hardware for the page table arrays.
Each page table has an entry (AttrIndex) that indexes into the
MAIR_EL1
register, which holds information about the cacheability of the respective
page. We currently define normal cacheable memory and device memory (which is
not cached).
/// Setup function for the MAIR_EL1 register.
fn set_up_mair() {
// Define the memory types that we will map. Cacheable normal DRAM and
// device.
MAIR_EL1.write(
// Attribute 1
MAIR_EL1::Attr1_HIGH::Memory_OuterWriteBack_NonTransient_ReadAlloc_WriteAlloc
+ MAIR_EL1::Attr1_LOW_MEMORY::InnerWriteBack_NonTransient_ReadAlloc_WriteAlloc
// Attribute 0
+ MAIR_EL1::Attr0_HIGH::Device
+ MAIR_EL1::Attr0_LOW_DEVICE::Device_nGnRE,
);
}
Afterwards, the Translation Table Base Register 0 - EL1 is set up with the base address of the LVL3_TABLE and
the Translation Control Register - EL1 is
configured.
Finally, the MMU is turned on through the System Control Register - EL1. The last step also enables caching for data and instructions.
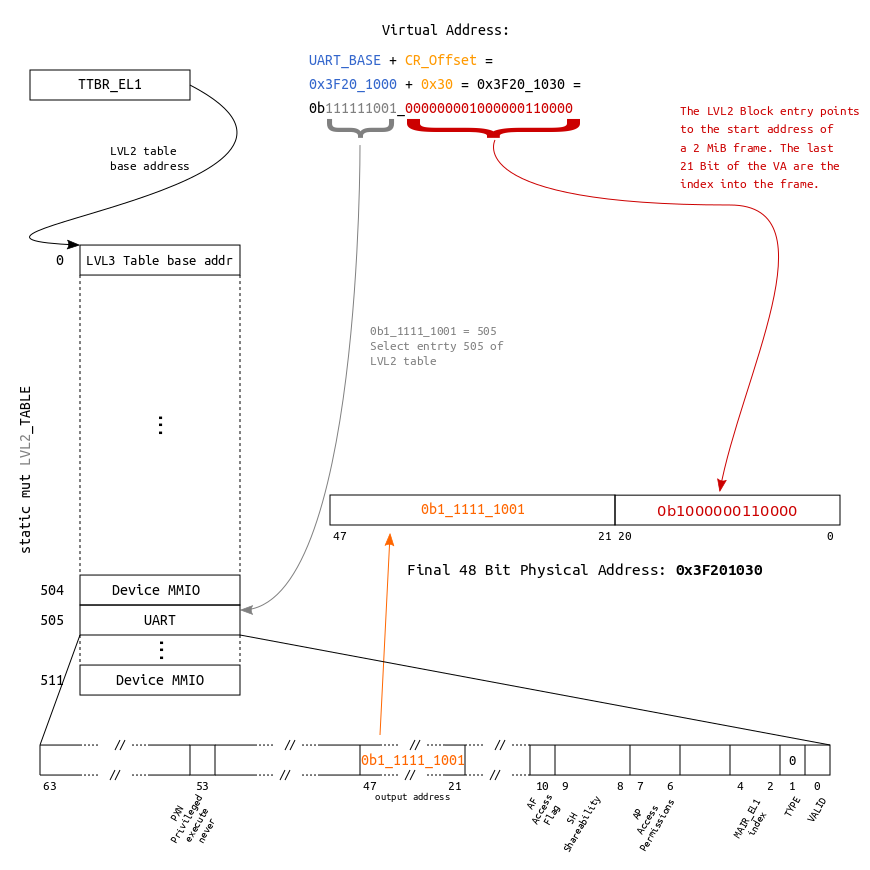
Address translation examples
For educational purposes, in memory.rs, a layout is defined which allows to
access the UART via two different virtual addresses:
- Since we identity map the whole
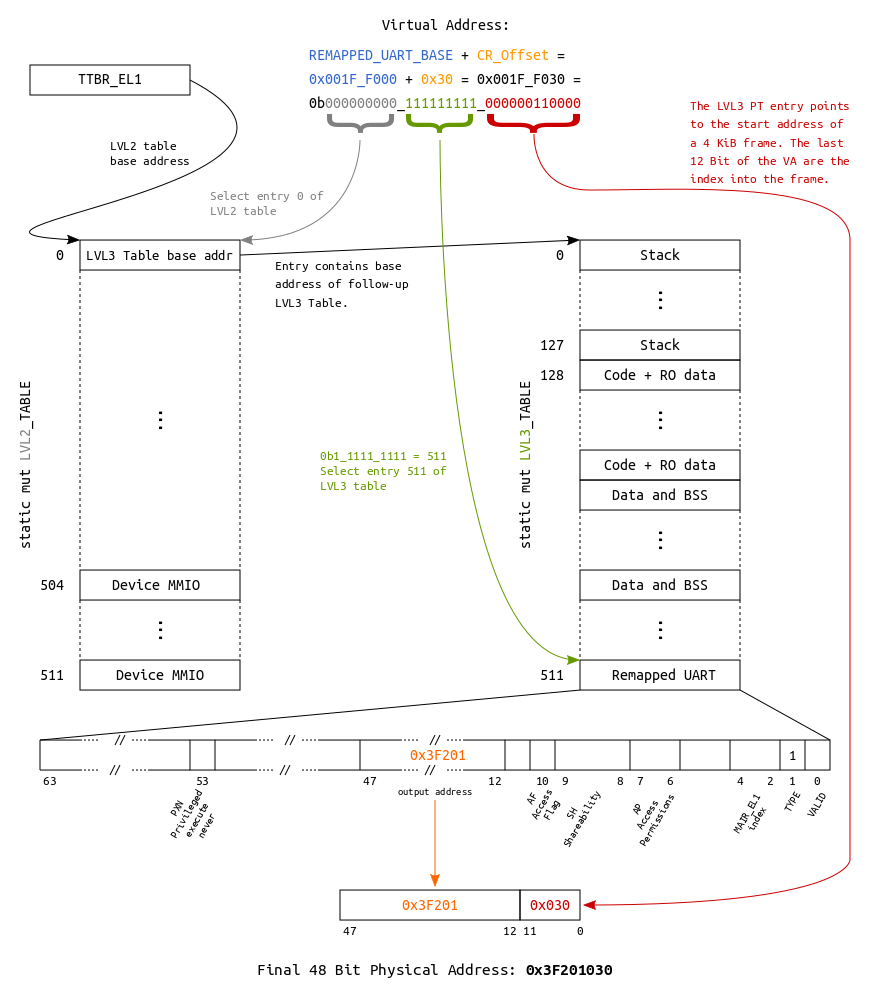
Device MMIOregion, it is accessible by asserting its physical base address (0x3F20_1000) after theMMUis turned on. - Additionally, it is also mapped into the last
4 KiBentry of theLVL3table, making it accessible through base address0x001F_F000.
The following two block diagrams visualize the underlying translations for the
two mappings, accessing the UART's Control Register (CR, offset 0x30).
Adress translation using a 2 MiB block descriptor
Adress translation using a 4 KiB page descriptor
Zero-cost abstraction
The MMU init code is also a good example to see the great potential of Rust's zero-cost abstractions[1][2] for embedded programming.
Take this piece of code for setting up the MAIR_EL1 register using the
cortex-a crate:
/// Setup function for the MAIR_EL1 register.
fn set_up_mair() {
// Define the memory types that we will map. Cacheable normal DRAM and
// device.
MAIR_EL1.write(
// Attribute 1
MAIR_EL1::Attr1_HIGH::Memory_OuterWriteBack_NonTransient_ReadAlloc_WriteAlloc
+ MAIR_EL1::Attr1_LOW_MEMORY::InnerWriteBack_NonTransient_ReadAlloc_WriteAlloc
// Attribute 0
+ MAIR_EL1::Attr0_HIGH::Device
+ MAIR_EL1::Attr0_LOW_DEVICE::Device_nGnRE,
);
}
This piece of code is super expressive, and it makes use of traits, different
types and constants to provide type-safe register manipulation.
In the end, this code sets the first four bytes of the register to certain values according to the data sheet. Looking at the generated code, we can see that despite all the type-safety and abstractions, we get super lean code:
00000000000803ac kernel8::memory::mmu::init::h7ef502c5548c1a62:
...
803cc: 88 e0 9f 52 mov w8, #0xff04
...
803d8: 08 a2 18 d5 msr MAIR_EL1, x8
Output
ferris@box:~$ make raspboot
[0] UART is live!
[1] Press a key to continue booting... Greetings fellow Rustacean!
[i] MMU: 4 KiB granule supported!
[i] MMU: Up to 40 Bit physical address range supported!
[2] MMU online.
Writing through the virtual mapping at base address 0x00000000001FF000.