| bios_glitch.png | ||
| README.md | ||
| screen1.png | ||
| v0_usbcap.png | ||
| v0.png | ||
| v2_splitter.png | ||
| v2.png | ||
DIY IP-KVM with Web-UI based on Raspberry Pi

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
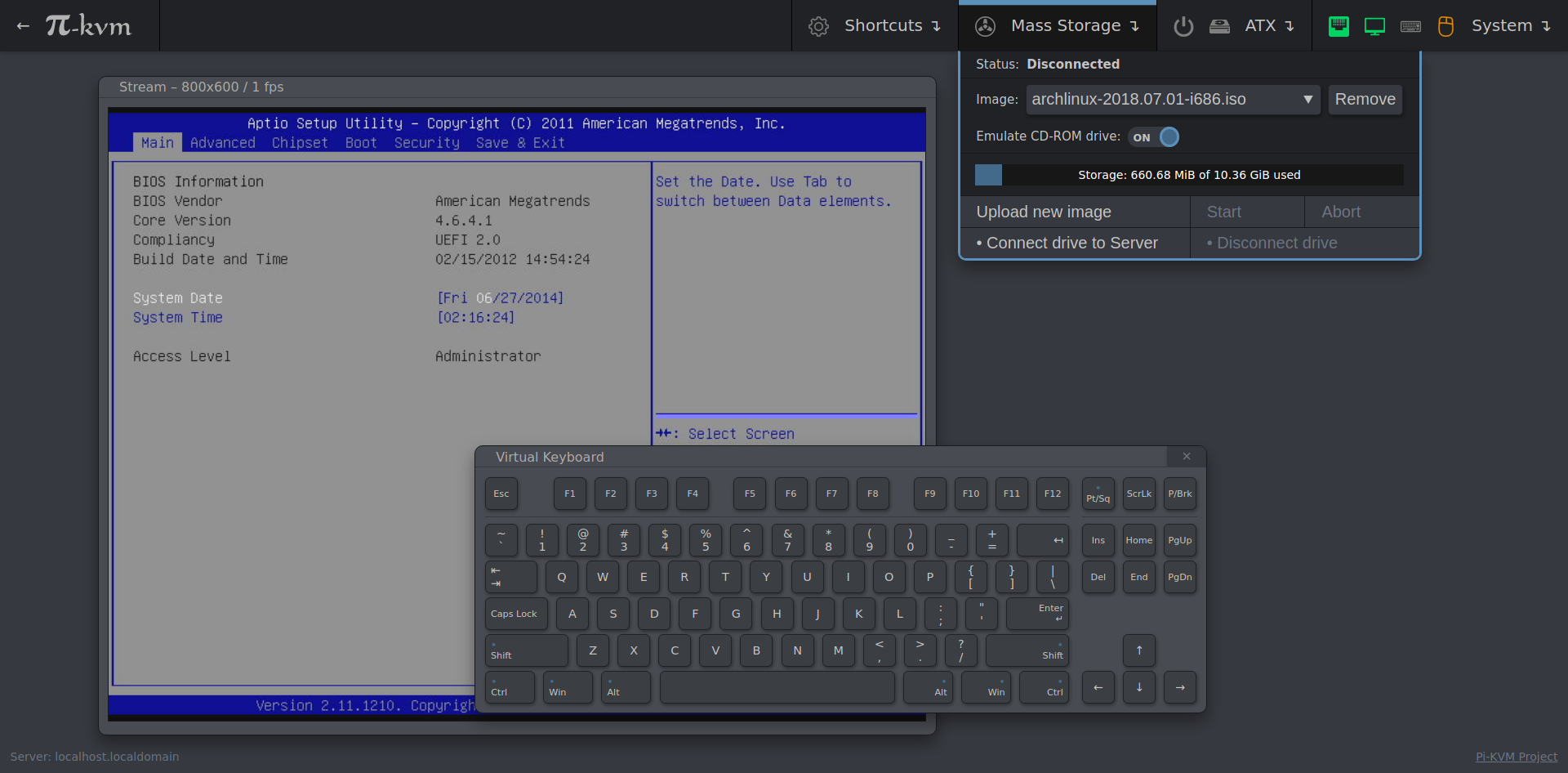
Stand-alone IP KVM device with a web interface with various video capture options and a bunch of features like keyboard/mouse control, ATX control (power/reset/HDD activity), Mass-Storage Device emulation and more.
Disclaimer
Q: What is the status of this project?
A: Although this documentation page is rarely updated, the project is maintained and developed. You can verify it by checking the activity in other repositories in our organization. Unfortunately, all our time is spent to code. We will be happy if someone can help us make a large and beautiful documentation on readthedocs.
Features
- Extra-lightweight and fancy Web-UI.
- IPMI BMC support. You can use
ipmitoolfor power management in your existing network infrastructure. - VNC support. You can use any suitable VNC client (see tips) to access the server.
- Advanced HID emulator based on OTG (on RPi4 and ZeroW) or using a single Arduino board (on RPi2 and RPi3). Mouse supported; keyboard works perfectly in BIOS; keyboard LEDs are supported too.
- Control the power of the server through ATX button connectors on the motherboard and get the status of the power LEDs and hard drive activity.
- Mass-storage device based on OTG (only for RPi4 and ZeroW)
- The ability to use any video capture device (include HDMI-to-CSI2 bridge).
- Own MJPG streamer written on C with multi-threading and GPU video encoding. It can change the resolution in real time by signal from HDMI source, report statistics about the video and much more (see README for detalis).
- Extensible authorization methods - you can configure multiple KVMs so that they use a common authorization service.
- Microservice architecture - the system consists of separated parts that each perform a strictly defined task.
- Plugin architecture to support a variety of hardware.
- Backend with clear API that can be used for scripts and alternative UI (for example you can make a desktop application or some scripts);
- A ready-to-use operating system that can be assembled just using
make buildand installed to SD-card usingmake install.
Required hardware
We support a variety of implementation choices of hardware (we call it platform). The two main are called v0 and v2.
- v0 platform is designed to work with Raspberry Pi that do not have OTG (Raspberry Pi 2 and 3), and requires a little more spare parts for the basic implementation. Also there does not work mass-storage device.
- v2 platform is the most modern implementation supporting all the features of Pi-KVM. It is designed to work with Raspberry Pi 4 and ZeroW (but we recommend using 4 because ZeroW is very slow).
Basic hardware
- Raspberry Pi 2, 3, 4 or ZeroW
- MicroSD card
- Raspberry Pi power supply 3A
Video capture side for lowcost S-Video (only for v0 platform)
- Easycap UTV007 device
- HDMI to S-Video converter (not all options work, but these three has been tested) (1 (for PCB (see bellow)) or 2 or 3)
Video capture side for HDMI (for v0 and v2 platforms)
- HDMI to CSI-2 Bridge board (Original Auvidea B101 or any analog based Toshiba TC358743 chip like Lusya bridge).
HID Subsystem (only for v0)
- Arduino Pro Micro (ATMega32u4) with hardware USB for HID sub-system
- Logic level converter module https://www.sparkfun.com/products/12009
- NPN transistor (almost any NPN transistor: 2n2222 or similar)
ATX control and other
- GPIO cables for connections (Dupont or identical, suitable for PLS pins and breadboards; for example https://www.amazon.com/gp/product/B01BV2A54G)
- 4x MOSFET relay OMRON G3VM-61A1
- Constant resistors, for transistor/relay (to Raspberry Pi) 220Ohm-1kOhm, those from ATX to relay need to be matched for your motherboard (supposedly 330-470 Ohm)
Setting up the hardware
Here is a diagram of how you connect all of the pieces (click to full size):
v0 Diagram
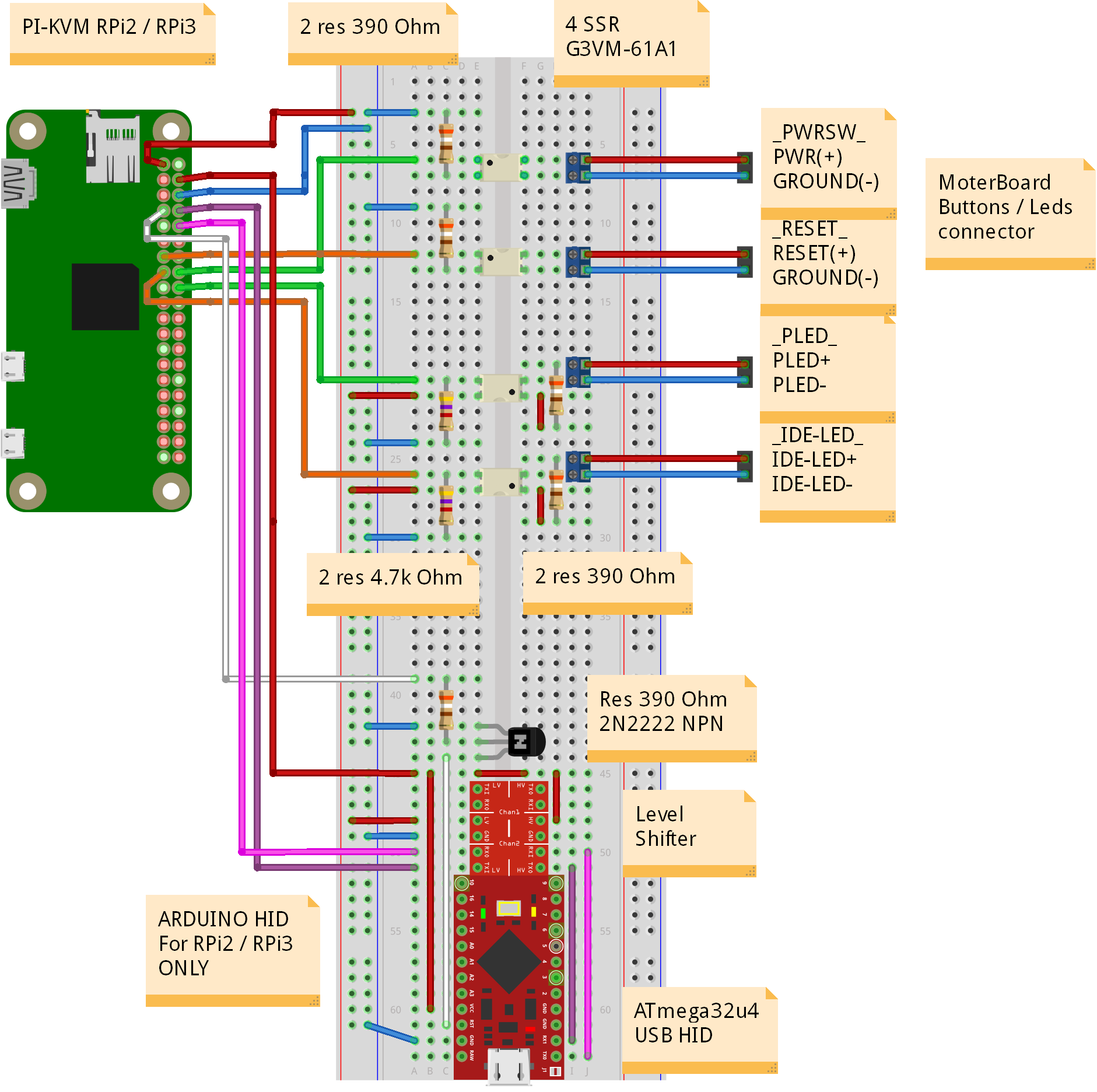
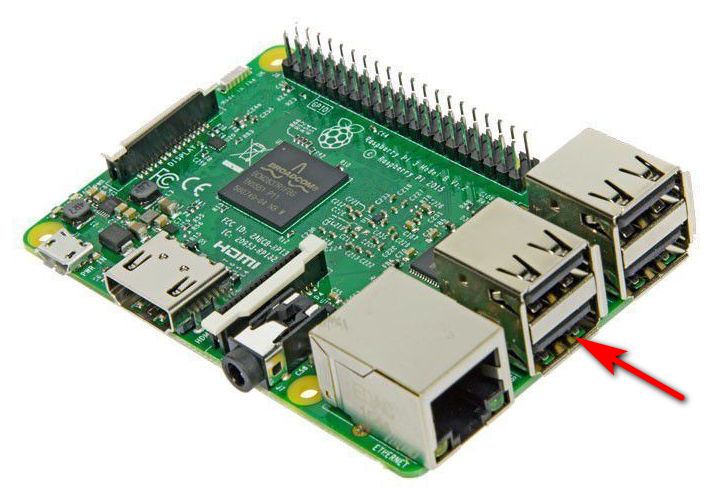
ATTENTION! The S-video capture device must be connected to the USB port shown, not anything else. It is bound in software.
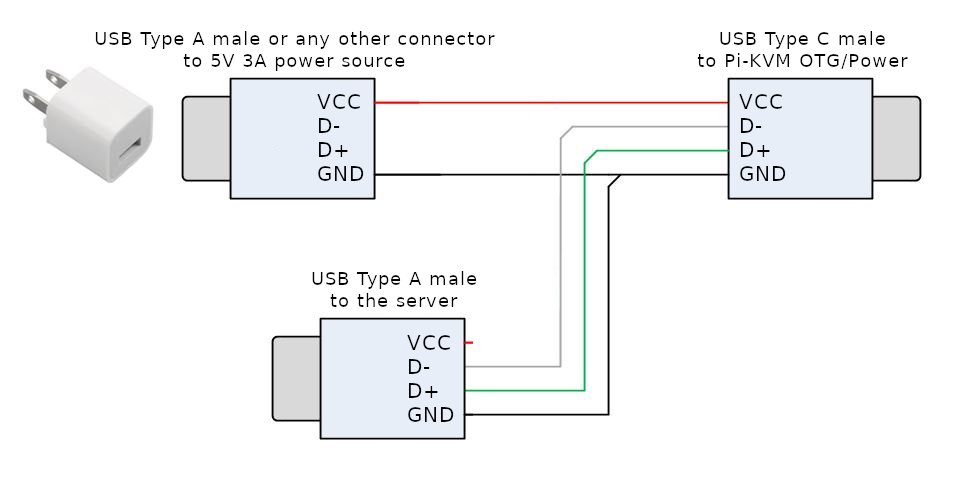
v2 Diagram
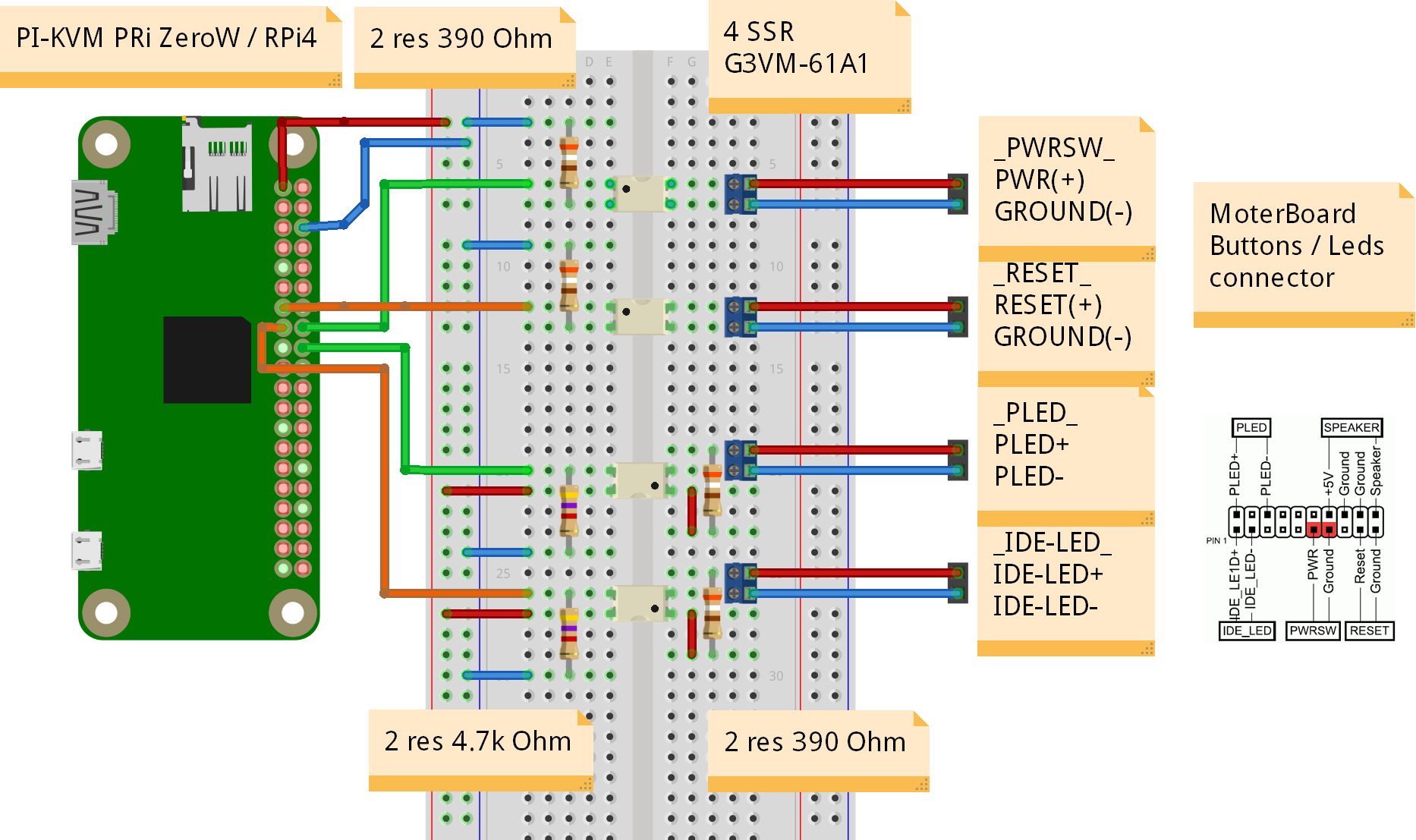
RPi4 only: since it uses one USB-C female connector to giving power and keyboard/mouse/drive emulation you also need to make a special cable to split DATA and POWER lines from USB-C (reasons). You can make it from two suitable connecting cables, or solder from scratch. Be sure to check the circuit diagram, otherwise you may damage your devices. Pinout specific used connectors you can easily find on request "USB pinout" in Google. Please note that if you will make a cable based on the two factory ones, the colors of the wires may not match those shown in the picture. Use a multimeter to make sure the connections are correct.
See this video tutorial for details: https://www.youtube.com/watch?v=uLuBuQUF61o
Also check out small instruction about soldering the ATX controller: https://www.youtube.com/watch?v=hKnKOuH_f8M
Thirdparty PCB for ATX: https://easyeda.com/mark.gilbert/zerow-kvm-v1
Building OS
Pi-KVM OS is based on Arch Linux ARM and contains all required packages and configs to work. To build the OS you will need any Linux machine with a fresh version of Docker (we recommand >= 1:19) with privileged mode (for fdisk and some other commands, check Makefiles if you don't trust us :) )
-
For a clean OS (Like Ubuntu 18) you need to install and configure docker (after adding user in the docker group a relogin is needed), as well as git and make.
[user@localhost ~]$ sudo apt-get install git make curl binutils -y [user@localhost ~]$ curl -fsSL https://get.docker.com -o get-docker.sh [user@localhost ~]$ sudo sh get-docker.sh [user@localhost ~]$ sudo usermod -aG docker $USERRe-login to apply changes.
-
Checkout build toolchain:
[user@localhost ~]$ git clone https://github.com/pikvm/os [user@localhost ~]$ cd os -
Determine the target hardware configuration (platform). If you are using an analog VGA video capture device, choose
PLATFORM=v0-vga. If you want to use HDMI with Auvidea B101, choosePLATFORM=v0-hdmi. Both options work with boardsBOARD=rpi2andBOARD=rpi3. For Raspberry Pi 4 or ZeroW you can choosePLATFORM=v2-hdmionly andBOARD=rpi4orBOARD=zerow. Other options are for specialized Pi-KVM boards (WIP). -
Create config file
config.mkfor the target system. You must specify the path to the SD card on your local computer (this will be used to format and install the system) and the version of your Raspberry Pi and platform. You can change other parameters as you wish. Please note: if your password contains the # character, you must escape it using a backslash likeROOT_PASSWD = pass\#word.[user@localhost os]$ cat config.mk # rpi3 for Raspberry Pi 3; rpi2 for the version 2, zerow for ZeroW BOARD = rpi4 # Hardware configuration PLATFORM = v2-hdmi # Target hostname HOSTNAME = pikvm # ru_RU, etc. UTF-8 only LOCALE = en_US # See /usr/share/zoneinfo TIMEZONE = Europe/Moscow # For SSH root user ROOT_PASSWD = root # Web UI credentials: user=admin, password=<this> WEBUI_ADMIN_PASSWD = admin # IPMI credentials: user=admin, password=<this> IPMI_ADMIN_PASSWD = admin # SD card device CARD = /dev/mmcblk0If you want to configure wifi (for ZeroW board for example) you must add these lines to
config.mk:WIFI_ESSID = "my-network" WIFI_PASSWD = "P@$$word" -
Build OS. It may take about an hour depending on your Internet connection:
[user@localhost os]$ make os -
Put SD card into card reader and install OS (you should have automatic mounting disabled:
systemctl stop udisk2or something like that):[user@localhost os]$ make install -
After installation remove the SD card and insert it into your RPi. Turn on the power. RPi will try to get ad IP address using DHCP on your LAN. It will be available via SSH.
-
If you can't find the device's address, try using the following command:
[user@localhost os]$ make scan -
Only for v0. Now you need to flash Arduino. This can be done using your RPi. Before starting this operation, disconnect the RESET wire from Arduino, otherwise the firmware will not be uploaded. Connect the Arduino and RPi with a suitable USB cable. Log in to RPi and upload the firmware. Then connect RESET wire back, disconnect USB and reboot RPi.
[user@localhost os]$ ssh root@<addr> [root@pikvm ~]# rw [root@pikvm ~]# systemctl stop kvmd [root@pikvm ~]# cp -r /usr/share/kvmd/hid ~ [root@pikvm ~]# cd ~/hid [root@pikvm hid]# make [root@pikvm hid]# make install [root@pikvm hid]# reboot -
Congratulations! Your Pi-KVM will be available via SSH (
ssh root@<addr>) and HTTPS (try to open it in a browser athttps://<addr>). For HTTPS a self-signed certificate is used by default.
Tips
-
The Pi-KVM file system is always mounted in read-only mode. This prevents it from being damaged by a sudden power outage. To change the configuration you must first switch FS to write mode using the command
rwfrom root. After the changes, be sure to run the commandroto switch it back to read-only. -
NEVER edit
/etc/kvmd/main.yaml. Use/etc/kvmd/override.yamlto redefine the system parameters. All other files that are also not recommended for editing have read-only permissions. If you edit any of these files, you will need to manually make changes to them when you upgrade your system. You can view the current configuration and all available KVMD parameters using the commandkvmd -m. -
Almost all KVMD (the main daemon controlling Pi-KVM) configuration files use YAML syntax. Read about it if you don't know how to use it.
-
If you want to disable the web terminal use these commands:
[root@pikvm ~]# systemctl disable kvmd-webterm [root@pikvm ~]# systemctl stop kvmd-webterm -
To disable authorization completely edit file
/etc/kvmd/override.yaml:kvmd: auth: enabled: falsethen restart
kvmd:[root@pikvm ~]# systemctl restart kvmd -
If you don't need to control ATX you can disable relevant web menu in
/etc/kvmd/override.yaml:kvmd: atx: type: disabledthen restart kvmd.
-
To use Wake-on-LAN on your server you must define some options such as server MAC and (optional) IP address. Use
/etc/kvmd/override.yaml. Write this:kvmd: wol: mac: ff:ff:ff:ff:ff:ffReplace
ff:ff:ff:ff:ff:ffto MAC of your server. By default, a packet is sent by a broadcast request to the entire IPv4 network (255.255.255.255, port9), but you can address it to a specific static address:kvmd: wol: mac: ff:ff:ff:ff:ff:ff ip: 192.168.0.100 # port: 9 # By default -
To use IPMI BMC you need to set up an appropriate account and run the
kvmd-ipmidaemon (systemctl start kvmd-ipmiandsystemctl enable kvmd-ipmi). Although Pi-KVM supports the IPMI protocol, we strongly recommend that you do not use outside trusted of networks due to its insecurity. Refer to the file/etc/kvmd/ipmipasswdto configure IPMI account. -
To use VNC you need to change the keyboard layout for non-US client keyboard using
/etc/kvmd/override.yaml. For example:vnc: keymap: /usr/share/kvmd/keymaps/ruBy default the username and password authorization is used. This is not supported by all clients (we recommend TigerVNC). To enable passphrase authorization, you need to edit the file
/etc/kvmd/vncpasswdto set passphrases and enable this feature in/etc/kvmd/override.yaml:vnc: auth: vncauth: enabled: trueAfter that you can enable
kvmd-vncdaemon (systemctl start kvmd-vncandsystemctl enable kvmd-vnc). VNC will be available on port 5900 by default. Please note: we strongly don't recommend you to use VNC in untrusted networks. The current implementation does not use encryption, and your passwords are transmitted over the network in a plain text.
Troubleshooting
-
In step 8 (
make install), you may encounter the following error:/root/.platformio/packages/tool-avrdude/avrdude: error while loading shared libraries: libtinfo.so.5: cannot open shared object file: No such file or directoryCreate a symlink for this library:
[root@pikvm ~]# ln -s /usr/lib/libtinfo.so.6 /usr/lib/libtinfo.so.5And run
make installagain. -
Unexpected interruption of loading the image to Mass Storage Drive
If problems occur when uploading even a small disk image it may be due to unstable network operation or antivirus software. It is well known that Kaspersky antivirus cuts off Pi-KVM connections for uploading, so you should add the site to the list of exceptions or not filter web requests with the antivirus. Antivirus can also affect the performance of certain interface elements, for example the quality slider.
Regarding Kaspersky...the solution is to set the website of pikvm in network in the exclusion list (Protection -> Private browsing -> Categories and exclusions -> Exclusions).
-
Glitchy/Wrong BIOS resolution
On some motherboards, the BIOS may be displayed at a lower resolution, or with some rendering issues/glitches, specially on newer ASUS ones.
e.g
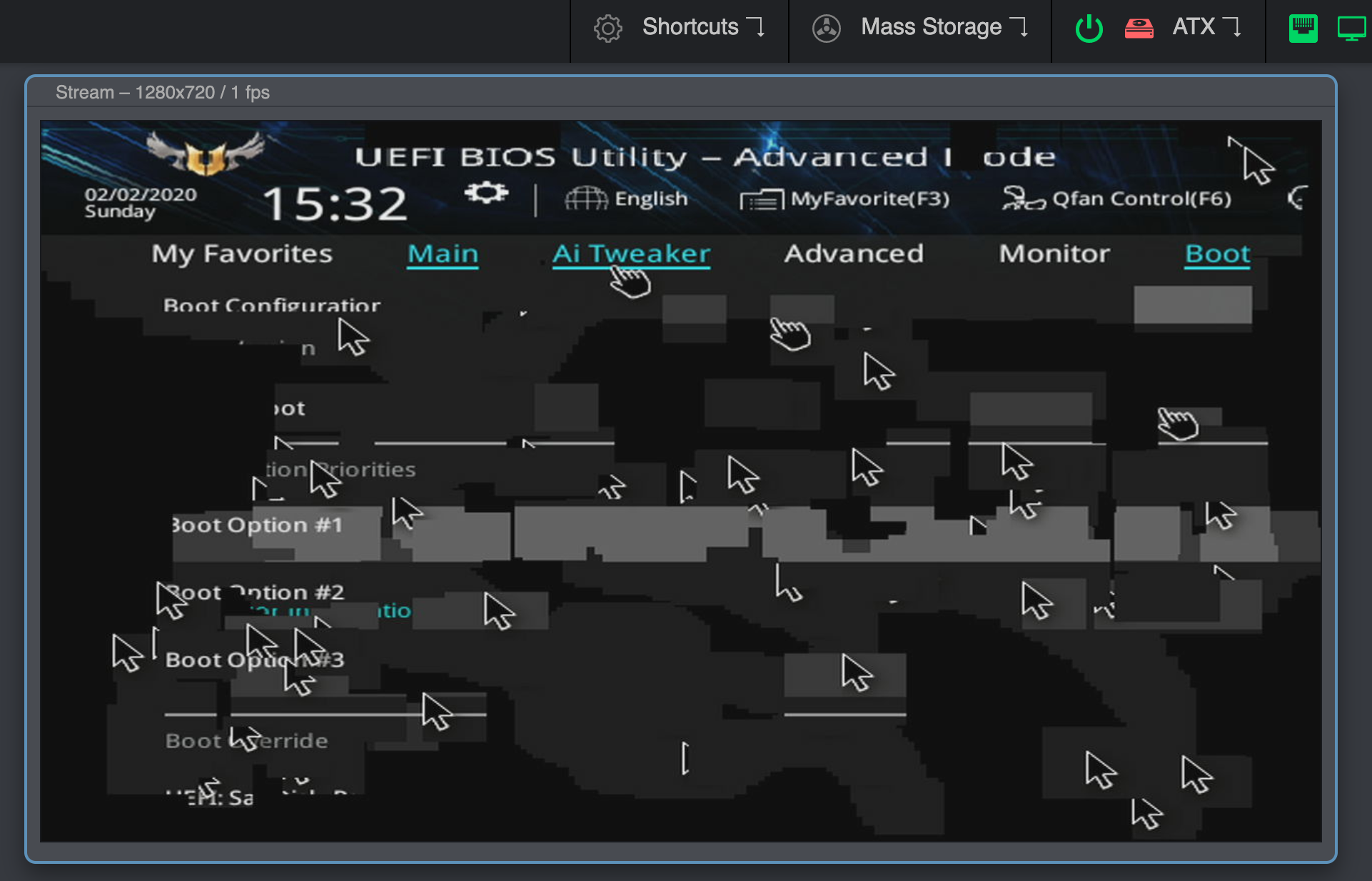
This can be solved by enabling Compatibility Support Module (CSM) on your BIOS, usually under the Boot options.
If you can't or don't want to enable CSM, you can try connecting a DisplayPort monitor, or a dummy plug. If you remove the DP cable/adapter the bug will show up again.
If none of this works, try connecting the DP cable first, boot into the BIOS, disable CSM and shutdown (do not restart) your PC. Boot into the BIOS and enable CSM then shutdown your PC. Then connect the HDMI and turn it on again.
-
If you have any problems or questions, you can contact us using Discord: https://discord.gg/bpmXfz5